Введение в емкостные датчики прикосновения. Датчики силы, механического напряжения и прикосновения
Электор 2008 №7-8
Работа ёмкостных датчиков прикосновения основана на электрической ёмкости человеческого тела. Например, когда близко к датчику подносят палец, то это создаёт ёмкость между датчиком и землёй, лежащую в диапазоне 30...100 пФ. Этот эффект может быть использован в датчиках приближения и переключателях, управляемых прикосновением.
Сенсорные ёмкостные датчики имеют очевидные преимущества по сравнению с другими датчиками (например, срабатывающими от наводок частотой 50/60 Гц или измеряющими сопротивление), но они более трудоёмки в реализации. Производители микросхем, такие как Microchip в прошлом создали специальные ИС для этих целей. Однако и сейчас можно создать надёжный ёмкостный детектор и/или переключатель, используя только небольшое число стандартных компонентов.
В этой схеме мы детектируем изменения ширины импульсов сигнала, возникающие при касании контакта. На рисунке 1 можно рассмотреть следующие узлы (слева направо):
Рис. 1. IC1 - 561ТЛ1
Генератор прямоугольных импульсов, выполненный на триггере Шмитта (ИС CD4093);
RC цепь с гасящим диодом, за которыми идёт триггер Шмитта/контактная пластина с изолирующим конденсатором ёмкостью 470 пФ;
- Интегрирующая RC цепь, преобразующая изменения ширины импульсов в напряжение. Это напряжение лежит в районе 2,9...3,2 вольт, когда до пластины дотрагиваются, и 2,6 вольт в другом случае.
- Компаратор LM 339 используется для сравнения напряжения в точке C с образцовым напряжением в точке D. Последнее составляет около 2,8 В и устанавливается делителем напряжения.
Как только произойдёт касание сенсорной пластины, выход схемы станет активным. Для пояснения работы схемы на рисунке 2 приведены осциллограммы сигналов в разных точках. Пунктирная линия показывает состояние при касании пластины датчика, сплошная линия - при отсутствии касания.
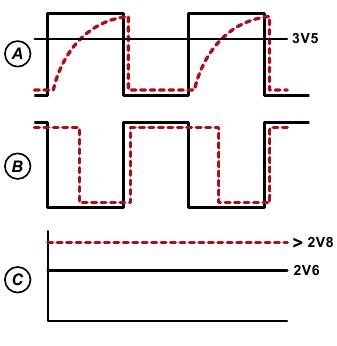
Рис. 2. Осциллограммы сигналов а разных точках.
Образцовое напряжение в точке D настраивается один раз с помощью делителя R4/R5 (изменяя значение R4). Величина этого напряжения сильно зависит от площади поверхности пластины-датчика (обычно несколько квадратных сантиметров). Большая площадь поверхности пластины увеличивает ёмкость и напряжение в точке C тем не менее будет больше, по сравнению с тем напряжением, когда пластины не касались. Образцовое напряжение в точке D должно быть установлено ближе к значению 3,4 В. Датчик прикосновения может так же работать с пластинами большой площади (например, можно использовать в качестве сенсора весь корпус).
Выходной сигнал может быть использован для включения различных нагрузок. Во многих случаях рекомендуется добавить на выход один триггер Шмитта, особенно если выход соединён с цифровым входом.
Вим Абуйс
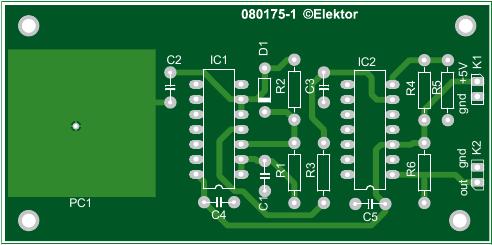
Рис. 4. Расположение компонентов на печатной плате.

Рис. 5. Печатная плата.

Рис. 6. Печатная плата (зеркальный вид).
Тач-сенсоры (датчики касания) бывают разных принципов действия, например резистивный (проводящие пленки), оптический (инфракрасный), акустический (SAW), емкостной и т.д. Данный проект является экспериментом с емкостным датчиком касания. Этот вид датчика хорошо известен как указывающее устройство, используемое в планшетных ПК и смартфонах.
Принцип емкостного датчика касания
Емкостный датчик касания обнаруживает изменение емкости, происходящее на электроде от закрытия проводящим предметом, например пальцем. Есть несколько методов измерения емкости. В этом проекте используется метод интеграции, который используется в измерителе емкости. Изменение емкости Cx довольно небольшое, около 1пФ до 10пФ, но оно будет легко обнаружено, потому что у измерителя емкости разрешение измерения составляет 20пФ. Также, объекты, которые будут обнаруживаться должны быть заземлены, чтобы создать Cx схему согласно с принципом действия. Однако она хорошо работает, даже если человеческое тело изолировано от земли. Это может быть по нижеследующей причине.

Аппаратная часть

Программное обеспечение
Во-первых, откалибруйте каждую точку (получите эталонное время связи с Cs), а затем запустите сканирование в постоянном периоде. Когда время интеграции увеличился и превысит порог, он решит “обнаружено”. Гистерезису требуется порог, или выход не будет стабильным при полу прикосновении. Время измерения для каждой точки равно времени интегрирования, так что это может быть сделано очень быстро.
Измеритель емкости измеряет время интеграции с разрешением один такт (100 нс) с аналоговым компаратором и функцией входной фиксации. Однако эта функция не доступна на всех портах ввода/вывода. Для реализации датчика касания на любом порту ввода/вывода, время интеграции измеряется опросом программным обеспечением, и разрешение становится 3 такта (375ns). В нормальном состоянии число отчета времени около 80, и это достаточно для сенсорных кнопок.
Заключение
В результате, я могу подтвердить, что емкостный сенсор может быть с легкостью реализован на обычном микроконтроллере. Пластиковая накладка может быть до 1 мм в толщину (в зависимости от диэлектрической проницаемости) для хорошей работы. Когда ATtiny2313 используется для модуля датчиков касания, она может иметь 15 точек прикосновения. Программа управления, используемая в этом проекте экспериментальна, и не проверялась в грязных условиях, таких как шумы и помехи, так что для реального использования может потребоваться любой анти-шумовой алгоритм.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| U? | МК AVR 8-бит | ATtiny2313-20PU | 1 | В блокнот | ||
| R1-R8 | Резистор | 1 МОм | 8 | В блокнот | ||
| R9-R16 | Резистор | R9-R16 | 8 | В блокнот | ||
| C1 | Электролитический конденсатор | 100 мкФ | 1 | В блокнот | ||
| C2 | Конденсатор | 100 нФ | 1 | В блокнот | ||
| D1-D8 | Светодиод | 8 |
Cтраница 1
Датчики касания используются просто для обнаружения факта контакта с объектом. Датчиком касания может служить простейший микровыключатель. Датчики механических напряжений используются для измерения величины силы, возникающей в месте контакта. Обычно в качестве сенсоров, измеряющих усилия, применяют тензодатчики.
В токарных станках датчики касания применяются для контроля размеров заготовки, обработанной детали и режущей кромки инструмента. Вопросы диагностирования роботов (применяются антропоморфные и портальные роботы, встроенные в токарный станок, и внешние, работающие в цилиндрической системе координат) рассмотрены в гл.
Для измерения износа прямыми методами применяют датчики касания, которые регистрируют либо размерный износ, либо, при их перемещении, износ по задней поверхности. Конструкция датчика приведена на рис. 4.8, а. Корпус 4 закрепляется на подвижном узле / станка. В обмотке электромагнита создается переменное магнитное поле, вызывающее колебания наконечника. При касании наконечником блока его колебания нарушаются, что регистрируется электронной системой 8 с усилителем 7, а координаты соответствуют измеряемому размеру. Датчик защищают от стружки. Его применяют на станках с ЧПУ и в ГПС не только для измерения износа, но и для определения фактических координат вершины лезвия инструмента с целью автоматической корректировки управляющих программ.
Принцип работы проволочного тактильного датчика (датчика касания) показан на рис. 5.26. Робот автоматически по координатам двух базовых точек А и В, определяемых тактильным датчиком на угловом соединении, по скорректированной программе отыскивает требуемое место начала сварки (точку С), если отклонение стыкового соединения от исходного положения вызвано его параллельным смещением. В случае, если смещение стыкового соединения от исходного положения вызвано его параллельным смещением с разворотом относительно точки сварки, то для корректировки программы позиционирования роботом горелки в начальную точку сварки необходимо определить датчиком координаты как минимум трех базовых точек на элементах соединения.
Нулевые головки обычно конструируются на базе датчиков касания, в качестве которых широко используются электро -, радио - и виброконтактные датчики. Эти головки, называемые еще головками касания, делятся на два класса: с изменяющимся и фиксированным нулевым положением измерительного наконечника.
Рассмотрим особенности укзззнных выше устройств при использовании их в качестве датчика касания в специфических условиях цеха ртутного электролиза.
Очувствление схватов и других исполнительных органов манипулятора выполняют датчики захватного усилия 6 и датчики касания 7 при взаимодействии ПР с внешней средой.
Сварочная часть ПР включает: сварочный выпрямитель; сварочную горелку; кронштейны крепления; механизм подачи сварочной проволоки; датчик касания заготовки для сварки; устройство управлением датчика касания; необходимое количество кабелей; баллон с инертным газом, редуктор с расходомером и подогревателем газа; шланги и рукава.
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.

Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.

Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.

Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.

Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.

Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.

Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.

Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.

Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.

Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.

Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
В данной статье мы подробно (но не слишком) рассмотрим принципы электричества, которые позволяют нам обнаруживать прикосновение человеческого пальца, используя немного больше, чем просто конденсатор.
Конденсаторы могут быть сенсорными
В течение последнего десятилетия или около того стало действительно трудно представить себе мир с электроникой без сенсорных датчиков прикосновений. Смартфоны являются тому наиболее заметным и распространенным примером, но, конечно, существуют и другие многочисленные устройства и системы, которые обладают датчиками прикосновений. Для построения сенсорных датчиков прикосновений могут использоваться и емкость, и сопротивление; в данной статье мы будем обсуждать только емкостные датчики, которые более предпочтительны в реализации.
Хотя применения, основанные на емкостных датчиках, могут быть довольно сложными, фундаментальные принципы, лежащие в основе данной технологии, достаточно просты. На самом деле, если вы понимаете суть емкости и факторы, которые определяют емкость конкретного конденсатора, вы стоите на правильном пути в понимании работы емкостных сенсорных датчиков прикосновения.
Емкостные сенсорные датчики касания делятся на две основные категории: на основе взаимной емкости и на основе собственной емкости. Первый из них, в котором конденсатор датчика состоит из двух выводов, которые действуют как излучающий и приемный электроды, является более предпочтительным для сенсорных дисплеев. Последний, в котором один вывод конденсатора датчика подключен к земле, является прямым подходом, который подходит для сенсорной кнопки, слайдера или колеса. В данной статье мы рассмотрим датчики на основе собственной емкости.
Конденсатор на базе печатной платы
Конденсаторы могут быть различных типов. Мы все привыкли видеть емкость в виде компонентов с выводами или корпусов поверхностного монтажа, но на самом деле, всё, что вам действительно необходимо, это два проводника, разделенных изолирующим материалом (т.е. диэлектриком). Таким образом, довольно просто создать конденсатор, используя лишь электропроводные слои, разделенные печатной платой. Например, рассмотрим следующие вид сверху и вид сбоку печатного конденсатора, используемого в качестве сенсорной кнопки прикосновения (обратите внимание на переход на другой слой печатной платы на рисунке вида сбоку).
Изолирующее разделение между сенсорной кнопкой и окружающей медью создает конденсатор. В этом случае, окружающая медь подключена к земле, и, следовательно, наша сенсорная кнопка может быть смоделирована, как конденсатор между сенсорной сигнальной площадкой и землей.
Возможно, сейчас вы захотите узнать, какую емкость реально обеспечивает такая разводка печатной платы. Кроме того, как мы рассчитаем ее точно? Ответ на первый вопрос: емкость очень мала, может составлять около 10 пФ. Что касается второго вопроса: не беспокойтесь, если забыли электростатику, потому что точное значение емкости конденсатора не имеет никакого значения . Мы ищем только изменения в емкости, и мы можем обнаружить эти изменения без знания номинального значения емкости печатного конденсатора.
Влияние пальца
Так что же вызывает эти изменения емкости, которые контроллер датчика прикосновений собирается обнаружить? Ну, конечно же, человеческий палец.
Прежде, чем мы обсудим, почему палец изменяет емкость, важно понимать, что здесь нет прямого электрического контакта; палец изолирован от конденсатора лаком на печатной плате и, как правило, слоем пластика, который отделяет электронику устройства от внешней среды. Так что палец не разряжает конденсатор , и, кроме того, количество заряда, хранимое в конденсаторе в определенный момент, не представляет интереса - скорее интерес представляет емкость в определенный момент.
Итак, почему же присутствие пальца изменяет емкость? Есть две причины: первая включает в себя диэлектрические свойства пальца, а вторая включает в себя его проводящие свойства.
Палец как диэлектрик
Обычно мы думаем о конденсаторе, как имеющем фиксированную величину, определяемую площадью двух проводящих пластин, расстоянием между ними и диэлектрической проницаемостью материала между пластинами. Мы, конечно, не можем изменить физические размеры конденсатора, просто прикоснувшись к нему, но мы можем изменить диэлектрическую проницаемость, так как палец человека обладает диэлектрическими характеристиками, отличающимися от материала (предположительно воздуха), который он вытесняет. Это правда, что палец не будет находиться в настоящей области диэлектрика, т.е. в изолирующем пространстве непосредственно между проводниками, но такое «вторжение» в конденсатор необязательно:
Как показано на рисунке, чтобы изменить диэлектрические характеристики, нет необходимости помещать палец между пластинами, поскольку электрическое поле конденсатора распространяется в окружающую среду.
Оказывается, что человеческая плоть является довольно хорошим диэлектриком, потому что наши тела состоят в основном из воды. Относительная диэлектрическая проницаемость вакуума равна 1, а относительная диэлектрическая проницаемость воздуха лишь немного выше (около 1,0006 на уровне моря при комнатной температуре). Относительная диэлектрическая проницаемость воды намного выше, около 80. Таким образом, взаимодействие пальца с электрическим полем конденсатора представляет собой увеличение относительной диэлектрической проницаемости, и, следовательно, приводит к увеличению емкости.
Палец как проводник
Любой, кто испытал на себе удар электрического тока, знает, что кожа человека проводит ток. Я уже упоминал выше, что прямого контакта между пальцем и сенсорной кнопкой (то есть ситуации, когда палец разряжает печатный конденсатор) нет. Тем не менее, это не означает, что проводимость пальца не имеет значения. Она на самом деле весьма важна, так как палец становится второй проводящей пластиной в дополнительном конденсаторе:
На практике мы можем предположить, что этот новый конденсатор, созданный пальцем, подключен параллельно существующему печатному конденсатору. Эта ситуация немного сложнее, потому что человек, использующий сенсорное устройство, электрически не соединен с землей на печатной плате, и, таким образом, эти два конденсатора не включены параллельно в обычном для анализа цепей смысле.
Тем не менее, мы можем думать о человеческом теле, как об обеспечивающем виртуальную землю, поскольку оно имеет относительно большую емкость, чтобы поглощать электрический заряд. В любом случае, нам не нужно беспокоиться о точной электрической связи между конденсатором с пальцем и печатным конденсатором; важным моментом является то, что псевдопараллельное соединение этих двух конденсаторов означает, что палец будет увеличивать общую емкость, так как конденсатор добавляется параллельно.
Таким образом, мы можем увидеть, что оба механизма влияния при взаимодействии пальца и емкостного датчика касания способствуют увеличению емкости.
Близкое расстояние или контакт
Предыдущее обсуждение приводит нас к интересной особенности емкостных датчиков касаний: измеряемое изменение емкости может быть вызвано не только контактом между пальцем и датчиком, но и близким расстоянием между ними. Я обычно думаю о сенсорном устройстве, как о замене механического переключателя или кнопки, но емкостная технология датчиков касаний на самом деле представляет собой новый уровень функциональности, позволяя системе определять расстояние между датчиком и пальцем.
Оба механизма изменения емкости, описанные выше, оказывают влияние, которое зависит от расстояния. Для механизма на базе диэлектрической проницаемости количество «мясного» диэлектрика взаимодействие с электрическим полем конденсатора увеличивается при приближении пальца к проводящим частям печатного конденсатора. Для механизма на базе проводящих свойств емкость конденсатора с пальцем (как и любого другого конденсатора) обратно пропорциональна расстоянию между проводящими пластинами.
Имейте в виду, что этот метода не подходит для измерения абсолютного расстояния между датчиком и пальцем; емкостные датчики не предоставляют тех данных, которые необходимы для выполнения точных вычислений абсолютных расстояний. Я полагаю, что можно было бы откалибровать емкостную сенсорную систему для грубых измерений расстояний, но так как схема емкостных датчиков была разработана для обнаружения изменения емкостей, то отсюда следует, что эта технология особенно подходит для обнаружения изменения в расстояниях, т.е. когда палец приближается или удаляется от датчика.
Заключение
Теперь вы должны точно понимать фундаментальные основы, на базе которых строятся емкостные сенсорные системы. В следующей статье мы рассмотрим методы реализации этих основ, которые помогут вам перейти от теории к практике.
Надеюсь, статья оказалась полезной. Оставляйте комментарии!
-
 17 апреля 2015Свято-троицкий чигиринский монастырь
17 апреля 2015Свято-троицкий чигиринский монастырь -
 17 апреля 2015Симеон II. Последний царь Болгарии
17 апреля 2015Симеон II. Последний царь Болгарии







